Train Thing Development Documentation

31 Jan - 6 Feb '22
- Upgraded the FTP tool used to move computer files to the website.
- All new arms are "sized" and drilled.
- A breakthrough with Tkinter! Got a simple application working which uses three different data entry widgets. Learning is slow.
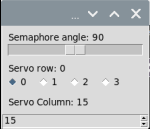
- The top slider adjust the angle sent to the servo from 0-180 to move the semaphore arm.
- The line of radio buttons select the address of the 16-channel PWM/Servo HAT.
- The bottom selector identifies the PWM/Servo channel the semaphore arm is connected to.
- Now I have the tool to refine the settings for each of the semaphore arms and find/document issues with the signals. Lots of things to fix.